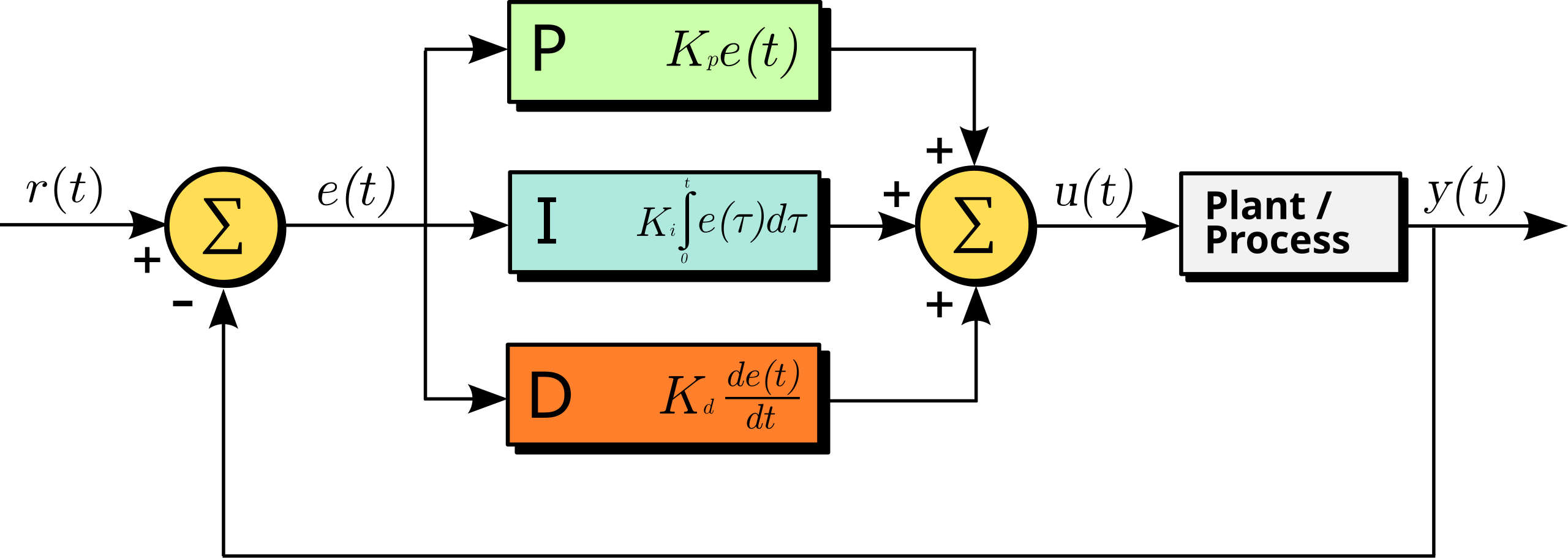
PID 제어

where
- is the proportional gain, a tuning parameter
- is the integral gain, a tuning parameter
- is the derivative gain, a tuning parameter
- is the set point
- is the process variable
- is the error



 is the set point
is the set point is the process variable
is the process variable is the error
is the error1. P 제어 / Proportional Control / 비례제어
- 현재 오차값에 gain 를 곱하여 output을 보정하는 방식.- gain이 너무 크면 output의 변화가 커서 시스템의 불안정을 초래한다.
- gain이 너무 작으면 응답 속도가 느림.
- output 변화의 대부분을 차지함. (I제어, D제어에 비해 출력변화 기여하는 비중이 높다.)
- 정상상태오차(steady state error)를 가지고 있다. => I제어를 추가하여 보정함.
- 정상상태오차(steady state error)를 가지고 있다. => I제어를 추가하여 보정함.
2. I 제어 / Integral Control / 적분제어
- 오차의 과거 누적값으로 인한 제어효과를 추가하여 잔류 오차를 제거함.
- 시간 경과에 따른 순시 오류의 합(이전에 수정했어야 하는 누적 오프셋에 gain 를 곱하여 컨트롤러 출력에 추가함.
- PV가 SP보다 커졌다 작았다를 반복하면서 [SP - PV]의 누적오차를 점점 상쇄시키면서 결과적으로 정상상태오차를 없애는 효과를 가져온다.
- I제어의 추가효과로 인해 overshoot이 커진다. => D제어를 추가하여 보정함.
3. D 제어 / Derivative Control / 미분제어
- 오차의 변화율에 gain 를 곱하여 overshoot을 상쇄시키는 역할을 한다. (예측 제어)
- flow or pressure 같이 noisy or fast responding control loops에는 사용하지 않는다.
- noise의 영향을 줄이기 위해 low-pass filter와 함께 사용할 수 있음.
- 시스템의 안정성에 영향을 미치기 때문에 실제 잘 사용하지 않음.

<= '작게' > '크게' 로 정정
댓글
댓글 쓰기